Szybkie i skuteczne wdrażanie elastycznych systemów ładowania pojazdów elektrycznych

W niniejszym artykule opisano zróżnicowany charakter wymagań projektowych stawianych publicznym stacjom ładowania.
Wdrażanie układu front-end systemu ładowania pojazdów elektrycznych
Rozwiązania firmy NXP do ładowania pojazdów elektrycznych koncentrują się na kilku grupach procesorów zaprojektowanych specjalnie w celu zapewnienia parametrów działania i funkcjonalności niezbędnych w wymagających zastosowaniach, takich jak projekty systemów ładowania pojazdów elektrycznych. Należąca do tej grupy procesorów seria mikrokontrolerów (MCU) Kinetis KM3x firmy NXP została zaprojektowana specjalnie w celu zapewnienia certyfikowanego dokładnego pomiaru dostarczanej energii. Mikrokontrolery MCU Kinetis KM3x bazują na 32-bitowym rdzeniu Cortex® M0Arm®, łączą w sobie obszerny zestaw bloków funkcjonalnych do pomiarów, bezpieczeństwa, komunikacji i obsługi systemu oraz zawierają wbudowaną pamięć flash i statyczną pamięć o dostępie swobodnym (SRAM) (ilustracja 2).

Ilustracja 2: Mikrokontrolery z serii Kinetis KM3x łączą w sobie kompletny zestaw bloków funkcjonalnych potrzebnych do wdrożenia certyfikowanego dokładnego pomiaru dostarczanej energii. (Źródło ilustracji: NXP Semiconductors).
Aby uprościć wdrażanie metrologii, układ front-end mikrokontrolera MCU KM35x posiada zintegrowany bardzo dokładny przetwornik analogowo-cyfrowy (ADC) sigma-delta, przetwornik analogowo-cyfrowy o sukcesywnej aproksymacji (SAR ADC), do czterech wzmacniaczy z programowanym wzmocnieniem (PGA), szybki komparator analogowy (HSCMP), blok logiczny kompensacji fazy oraz wewnętrzny wzorzec napięcia (VREF) wysokiej precyzji z niskim dryftem temperaturowym. Dla zabezpieczenia integralności jednostki metrologicznej przewidziano wbudowane funkcje zabezpieczeń z aktywnym, jak i pasywnym wykrywaniem nieautoryzowanych ingerencji ze znacznikami czasu. Używane w połączeniu z zewnętrznymi czujnikami, przekaźnikami i innymi urządzeniami peryferyjnymi bloki te zapewniają pełną funkcjonalność niezbędną do szybkiego wdrożenia zaawansowanego podsystemu metrologicznego dla układu front-end gniazda zasilania systemu ładowania pojazdów elektrycznych (ilustracja 3).

Ilustracja 3: W przypadku mikrokontrolera MCU Kinetis KM deweloperzy potrzebują tylko kilku dodatkowych komponentów zewnętrznych do wdrożenia podsystemu gniazd zasilania pojazdu elektrycznego. (Źródło ilustracji: NXP Semiconductors)
Wdrożenie kontrolera systemu ładowania pojazdów elektrycznych
Jak wspomniano powyżej, kontroler systemu ładowania pojazdów elektrycznych koordynuje szeroką gamę funkcji potrzebnych w każdym systemie. Wymagania tego podsystemu dyktują użycie procesora zarówno zdolnego do działania w czasie rzeczywistym potrzebnego do zapewnienia precyzyjnej kontroli systemu ładowania, jak i przepustowości przetwarzania potrzebnej do obsługi różnych protokołów przy jednoczesnej minimalizacji powierzchni i kosztów projektu.
Ta oparta na rdzeniu Arm Cortex-M7 seria procesorów crossover i.MX RT firmy NXP oferuje możliwości pracy w trybie rzeczywistym dzięki wbudowanym mikrokontrolerom, przy zachowaniu parametrów działania na poziomie procesorowym. Częstotliwość robocza 600MHz, pełny zestaw urządzeń peryferyjnych oraz procesory i.MX RT, takie jak i.MX RT1064, pozwalają sprostać wymaganiom w zakresie odpowiedzi w czasie rzeczywistym o niskiej latencji. Jednocześnie funkcje, takie jak duża pamięć wbudowana w układ mikroelektroniczny, zewnętrzny kontroler pamięci, podsystem graficzny i wiele interfejsów łączności, spełniają wymagania zastosowania (ilustracja 4).

Ilustracja 4: Procesor crossover i.MX RT1064 łączy w sobie urządzenia peryferyjne, pamięć oraz podsystem procesora Arm Cortex-M7, zaprojektowany w celu realizacji zarówno procesów w czasie rzeczywistym, jak i działań na poziomie procesora aplikacji. (Źródło ilustracji: NXP Semiconductors)
Oprócz spełnienia krytycznych wymagań dotyczących czasu rzeczywistego i parametrów działania, projekty systemów ładowania pojazdów elektrycznych muszą zapewniać zabezpieczenia na wielu frontach, w tym wykrywanie nieautoryzowanych ingerencji oraz uwierzytelnianie połączeń zasilania i metod płatności. W celu zapewnienia ochrony danych, bezpiecznego uruchamiania i bezpiecznego debugowania, deweloperzy mogą skorzystać ze zintegrowanych funkcji zabezpieczeń procesora i.MX RT, w tym rozruchu o wysokim stopniu pewności, kryptografii sprzętowej, szyfrowania magistrali, bezpiecznego przechowywania danych w pamięci nieulotnej i bezpiecznego kontrolera JTAG (Joint Test Action Group).
Aby jeszcze bardziej zwiększyć bezpieczeństwo w kontrolerze systemu ładowania pojazdów elektrycznych, projekt zazwyczaj uzupełniają funkcje zabezpieczeń procesora i.MX RT poprzez włączenie bezpiecznego elementu EdgeLock SE050 firmy NXP. Element SE050 zaprojektowano w celu zapewnienia kompleksowego zabezpieczenia w całym cyklu życia. Zapewnia on sprzętowe akceleratory zabezpieczeń dla szeregu popularnych algorytmów kryptograficznych, funkcjonalności modułu zaufanej platformy (TPM), bezpiecznych transakcji magistrali i bezpiecznego przechowywania. Wykorzystanie tego urządzenia do zapewnienia systemu Root of Trust (RoT) dla środowiska wykonawczego pozwala deweloperom zabezpieczyć krytyczne operacje, w tym uwierzytelnianie, bezpieczne wdrażanie, ochronę integralności i atestację.
Korzystając z procesora i.MX RT i urządzenia EdgeLock SE05x, deweloper potrzebuje tylko kilku dodatkowych komponentów, aby wdrożyć podsystem kontrolera zaprojektowany do uruchamiania wysokowydajnego systemu operacyjnego czasu rzeczywistego (RTOS) (ilustracja 5).
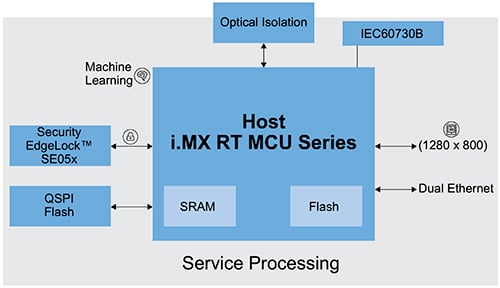
Ilustracja 5: Dzięki zintegrowanej funkcjonalności i parametrom działania, mikrokontrolery i.MX RT upraszczają projektowanie podsystemów kontrolerów dla systemów ładowania pojazdów elektrycznych. (Źródło ilustracji: NXP Semiconductors)